You have no items in your shopping cart.
Subtotal: $0.00
You have no items in your shopping cart.
On orders over $1500
(Continental United States only)
Two automatic tuning procedures are provided in the 2416:
• A one-shot tuner which automatically sets up the initial values of the parameters listed in Table 4-1 below. 
• Adaptive tuning which continuously monitors the error from setpoint and modifies the PID values if necessary.
One-shot Tuning:
The ‘one-shot’ tuner works by switching the output on and off to induce an oscillation in the measured value. From the amplitude and period of the oscillation, it calculates the tuning parameter values. If the process cannot tolerate full heating or cooling being applied during tuning, then the level of heating or cooling can be restricted by setting the heating and cooling power limits in the ‘oP’ list.
However, the measured value must oscillate to some degree for the tuner to be able to calculate values. A One-shot Tune can be performed at any time, but normally it is performed only once during the initial commissioning of the process. However, if the process under control subsequently becomes unstable (because its characteristics have changed), you can re-tune again for the new conditions.
It is best to start tuning with the process at ambient temperature. This allows the tuner to calculate more accurately the low cutback and high cutback values which restrict the amount of overshoot, or undershoot.
How to tune
1. Set the setpoint to the value at which you will normally operate the process.
2. In the ‘Atun’ list, select ‘tunE’ and set it to ‘on’.
3. Press the Page and Scroll buttons together to return to the Home display. The display will flash ‘tunE’ to indicate that tuning is in progress.
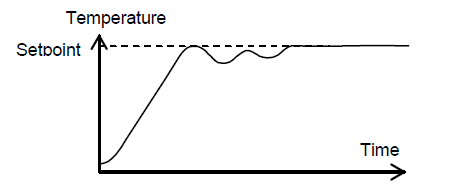
4. The controller induces an oscillation in the temperature by first turning the heating on, and then off. The first cycle is not complete until the measured value has reached the required setpoint.
5. After two cycles of oscillation the tuning is completed and the tuner switches itself off.
6. The controller then calculates the tuning parameters listed in Table 4-1 above, and resumes normal control action. If you want ‘Proportional only’, ‘PD’, or ‘PI’ control, you should set the ‘ti’ or ‘td’ parameters to OFF before commencing the tuning cycle. The tuner will leave them off and will not calculate a value for them.
Typical automatic tuning cycle
Calculation of the cutback values
Low cutback and High cutback are values that restrict the amount of overshoot or undershoot that occurs during large step changes in temperature (for example, under start-up conditions). If either low cutback, or high cutback, is set to ‘Auto’ the values are fixed at three times the proportional band, and are not changed during automatic tuning.
Adaptive tune
Adaptive tuning is a background algorithm, which continuously monitors the error from setpoint and analyses the control response during process disturbances. If the algorithm recognizes an oscillatory, or under-damped, response it recalculates the Pb, ti and td values. Adaptive tune is triggered whenever the error from setpoint exceeds a trigger level. This trigger level is set in the parameter ‘drA.t’, which is found in the Autotune list. The value is in display units. It is automatically set by the controller, but can also be manually re-adjusted. Adaptive tune should be used with:
1. Processes whose characteristics change as a result of changes in the load, or setpoint.
2. Processes that cannot tolerate the oscillation induced by a One-shot tune.
Adaptive tune should not be used:
1. Where the process is subjected to regular external disturbances that could mislead the adaptive tuner.
2. For highly interactive multi-loop applications.
However, moderately interactive loops, such as multi-zone extruders, should not give a problem.
MANUAL TUNING
If for any reason automatic tuning gives unsatisfactory results, you can tune the controller manually. There are a number of standard methods for manual tuning. The one described here is the Ziegler-Nichols method.
With the process at its normal running temperature:
1. Set the Integral Time ‘ti’ and the Derivative Time ‘td’ to OFF.
2. Set High Cutback and Low Cutback, ‘Hcb’ and ‘Lcb’, to ‘Auto’.
3. Ignore the fact that the temperature may not settle precisely at the setpoint.
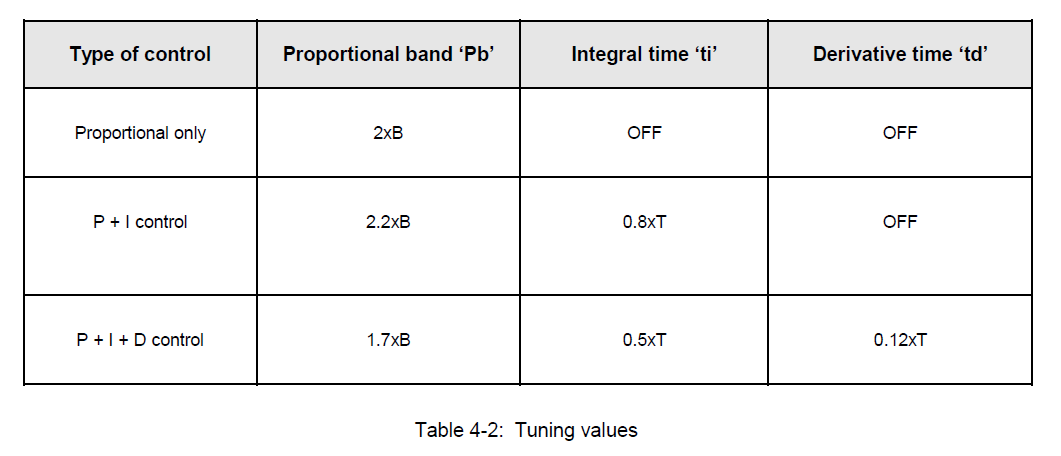
4. If the temperature is stable, reduce the proportional band ‘Pb’ so that the temperature just starts to oscillate. If the temperature is already oscillating, increase the proportional band until it just stops oscillating. Allow enough time between each adjustment for the loop to stabilize. Make a note of the proportional band value ‘B’ and the period of oscillation ‘T’.
5. Set the Pb, tiand td parameter values according to the calculations given in
You must be logged in to post a comment.
click here to log in


